10
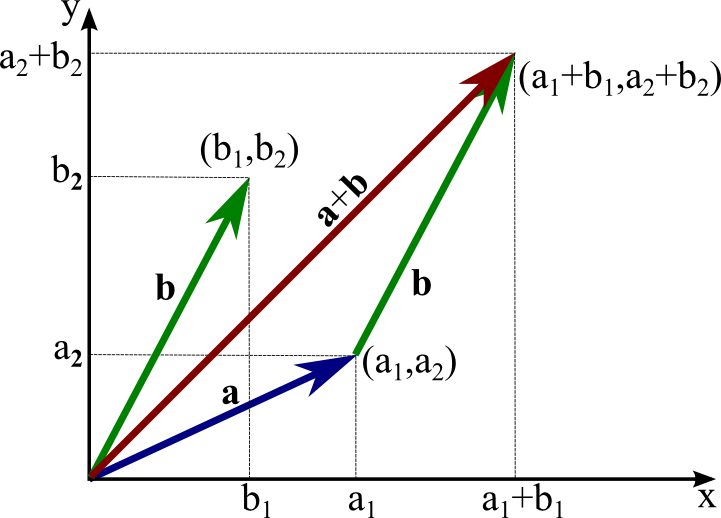
के साथ एक समन्वय प्रणाली में वैक्टर प्लॉटिंग मैं कार्टेशियन विमान में वैक्टरों की साजिश पर सलाह की तलाश में हूं। कार्य बिंदुओं (निर्देशांक) को प्लॉट करना है और फिर उन्हें किसी स्रोत बिंदु पर एक तीर से जोड़ने के लिए (0,0 कहें)। नीचे दी गई छवि को एक विचार देना चाहिए। मुझे रंगों और नामकरण वैक्टर/अंक के बारे में परवाह नहीं है, यह सिर्फ समन्वय विमान में तीरों की साजिश के बारे में है। मुझे यकीन है कि कुछ पुस्तकालय रैखिक बीजगणित वैक्टर और संचालन की साजिश के लिए आर (या पायथन) में मौजूद है।आर या पायथन
किसी भी पॉइंटर्स की सराहना की जाएगी!
vectors in a plane http://mathinsight.org/media/image/image/vector_2d_add.png

{kind=link}
"किसी भी संकेत दिए गए सराहना की जाएगी" * कराहना * – Spacedman